§2.6 Кинетическая энергия. Referat
В этом параграфе никакие новые сведения не сообщаются, но подчеркиваются и разъясняются некоторые важные особенности потенциальной энергии, на которые следует обратить внимание.
Потенциальная энергия - энергия взаимодействия тел
Важно отчетливо представлять себе, что кинетическая энергия - величина, относящаяся к одному телу, а потенциальная энергия - это всегда энергия взаимодействия по меньшей мере двух тел (или частей одного тела) друг с другом. Понятие потенциальной энергии относится к системе тел, а не к одному телу. Если в системе имеется несколько тел, то полная потенциальная энергия системы равна сумме потенциальных энергий всех пар взаимодействующих тел (любое тело взаимодействует с каждым из остальных).
Рис. 6.15
Потенциальная энергия характеризует взаимодействие тел именно потому, что само понятие силы всегда относится к двум телам: к телу, на которое действует сила, и к телу, со стороны которого она действует.
При получении выражения для кинетической энергии мы не использовали эту особенность силы, сразу заменив ее в формуле для работы произведением массы на ускорение согласно второму закону Ньютона. Именно поэтому понятие кинетической энергии относится к одному телу.
Выражение же для потенциальной энергии мы получили с помощью известной зависимости сил от расположения взаимодействующих тел, не используя уравнения движения. Равенство А = -АЕр определяет потенциальную энергию безотносительно к уравнениям движения. Поэтому потенциальная энергия является просто другой характеристикой (наряду с силой) взаимного действия тел друг на друга.
Часто при выводе формулы, связывающей изменение потенциальной энергии с работой сил, одно из тел системы принимают за неподвижное. Так, когда рассматривают падение тела на Землю под действием силы тяжести, то смещением Земли при этом пренебрегают. Поэтому работа сил взаимодействия между Землей и телом сводится к работе только одной силы, действующей на тело.
Или другой пример. Сжатая или растянутая пружина, действующая на тело, обычно закреплена одним концом, и этот конец пружины не перемещается (фактически он скреплен с земным шаром). Работу совершает при этом лишь сила упругости деформированной пружины, приложенная к телу.
Из-за этого потенциальную энергию системы двух тел привыкают рассматривать как энергию одного тела. Это может привести к путанице.
В действительности во всех случаях справедливо следующее утверждение: изменение потенциальной энергии двух тел, взаимодействующих с силами, зависящими только от расстояния между телами, равно работе этих сил, взятой со знаком минус:
A = F12- Аг, + F21 ¦ Аг2 = ~ = -АЕр. (6.7.1)
Здесь F12 - сила, действующая на тело 1 со стороны тела 2, а F21 - сила, действующая на тело 2 со стороны тела 1 (рис. 6.15).
Нулевой уровень потенциальной энергии
Согласно уравнению (6.7.1) работа сил взаимодействия определяет не саму потенциальную энергию, а ее изменение.
Поскольку работа определяет лишь изменение потенциальной энергии, то только изменение энергии в механике имеет физический смысл. Поэтому можно произвольно выбрать со-стояние системы, в котором ее потенциальная энергия считается равной нулю. Этому состоянию соответствует нулевой уровень потенциальной энергии. Ни одно явление в природе или технике не определяется значением самой потенциальной энергии. Важна лишь разность значений потенциальной энергии в конечном и начальном состояниях системы тел.
Выбор нулевого уровня производится по-разному и диктуется исключительно соображениями удобства, т. е. простотой записи уравнения, выражающего закон сохранения энергии. Обычно в качестве состояния с нулевой потенциальной энергией выбирают состояние системы с минимальной энергией. Тогда потенциальная энергия всегда положительна.
У пружины потенциальная энергия минимальна в отсутствие деформации, а у камня - когда он лежит на поверхности
2
Земли. Поэтому в первом случае Ер = ^i^L (рис. 6.16), а во втором случае Ер = mgh (рис. 6.17). Но к данным выражениям можно добавить любую постоянную величину С, и это ничего
2
не изменит. Можно считать, что Е = ^^ + С и Е = mgh + С.
г Д Р
Если во втором случае положить С = -mgh0, то это будет означать, что за нулевой уровень энергии принята энергия на высоте hQ над поверхностью Земли.
О
h
м
о о
Иногда невозможно выбрать нулевой уровень потенциальной энергии так, чтобы минимальная энергия равнялась нулю. Так, например, потенци-альную энергию двух тел, взаимодей-ствующих посредством сил всемирного тяготения, можно записать так:
m-i т.* -G-
+ С. Рис. 6.18
При г -» 0 первое слагаемое стремится к -°о. Поэтому минимальное значение энергии можно считать равным нулю лишь при С = °о. Но пользоваться уравнениями, в которые входит бесконечная величина, разумеется, нельзя. Поэтому здесь удобнее положить С = О и тем самым за нулевой уровень принять потенциальную энергию в состоянии, когда тела бесконечно удалены друг от друга (г = °о). Тогда нулевому уровню будет соответствовать не минимальная энергия, а максимальная. При любом конечном значении г потенциальная энергия отрицательна (рис. 6.18).
Независимость потенциальной энергии от выбора системы отсчета
Заметим еще раз, что понятие потенциальной энергии имеет смысл для таких систем, в которых силы взаимодействия консервативны, т. е. зависят лишь от расстояния между телами или их частями. Соответственно и потенциальная энергия зависит от расстояния между телами или их частями: от высоты камня над поверхностью Земли, от длины пружины, от рас-стояния между точечными телами. От координат тел потенци-альная энергия непосредственно не зависит. (Лишь постольку, поскольку расстояния являются функциями координат, можно говорить о зависимости от координат.) Отсюда следует очень важный вывод, на который обычно не обращают внимания. Так как расстояния во всех системах отсчета, движущихся и неподвижных, одни и те же, потенциальная энергия не зависит от выбора системы отсчета.
Но как же это может быть? Ведь АЕр = -А, а работа зависит от выбора системы отсчета. Вот здесь-то и проявляется отчетливо тот факт, что потенциальная энергия есть энергия взаимодействия двух тел, а ее изменение определяется работой сил, действующих на оба тела. При переходе от неподвижной системы к движущейся меняются работы обеих сил, но суммарная работа остается неизменной. В самом деле, если в некоторой системе отсчета за время At совершается работа
А1 = $12 " + ^21 " А?2"
то в другой системе, движущейся относительно первой, работа равна
А2 = F12 (Дгі + Аг0) + F21 (Аг2 + Лг0),
где Аг0 - перемещение систем отсчета друг относительно друга за время At.
Так как по третьему закону Ньютона F12 = ~F21, то
F12 ¦ Ar0 + F2j Ar0 = 0. Следовательно, At = A2.
Различия между потенциальной и кинетической энергией
Кинетическая энергия зависит только от скоростей тел, а потенциальная - только от расстояний между ними.
Далее, положительная работа внутренних сил всегда приводит к увеличению кинетической энергии, но обязательно уменьшает энергию потенциальную:
AEk=A, но АЕр = -А.
Кинетическая энергия всегда положительна, а потенциальная энергия может быть как положительной, так и отрицательной.
Изменение кинетической энергии всегда равно работе действующих на тело сил, а изменение потенциальной энергии равно (со знаком минус) работе только консервативных сил (но не сил трения, зависящих от скорости).
И потенциальная и кинетическая энергии являются функциями состояния системы, т. е. они точно опреде-лены, если известны координаты и скорости всех тел системы.
Первый закон Ньютона постулирует наличие такого явления, как инерция тел. Поэтому он также известен как Закон инерции. Инерция - это явление сохранения телом скорости движения (и по величине, и по направлению), когда на тело не действуют никакие силы. Чтобы изменить скорость движения, на тело необходимо подействовать с некоторой силой. Естественно, результат действия одинаковых по величине сил на различные тела будет различным. Таким образом, говорят, что тела обладают инертностью. Инертность - это свойство тел сопротивляться изменению их текущего состояния. Величина инертности характеризуется массой тела. Существуют такие системы отсчёта, называемые инерциальными, относительно которых материальная точка при отсутствии внешних воздействий сохраняет величину и направление своей скорости неограниченно долго.
Второй закон Ньютона - дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и получающимся от этого ускорением этой точки. Фактически, второй закон Ньютона вводит массу как меру проявления инертности материальной точки в выбранной инерциальной системе отсчёта (ИСО). В инерциальной системе отсчёта ускорение, которое получает материальная точка, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе.
Трети закон.Этот закон объясняет, что происходит с двумя взаимодействующими телами. Возьмём для примера замкнутую систему, состоящую из двух тел. Первое тело может действовать на второе с некоторой силой, а второе - на первое с силой. Как соотносятся силы? Третий закон Ньютона утверждает: сила действия равна по модулю и противоположна по направлению силе противодействия. Подчеркнём, что эти силы приложены к разным телам, а потому вовсе не компенсируются. Действию всегда есть равное и противоположное противодействие, иначе - взаимодействия двух тел друг на друга равны и направлены в противоположные стороны.
4 ) При́нцип относи́тельности - фундаментальный физический принцип, согласно которому все физические процессы в инерциальных системах отсчёта протекают одинаково, независимо от того, неподвижна ли система или она находится в состоянии равномерного и прямолинейного движения.
Отсюда следует, что все законы природы одинаковы во всех инерциальных системах отсчёта.
Различают принцип относительности Эйнштейна (который приведён выше) и принцип относительности Галилея, который утверждает то же самое, но не для всех законов природы, а только для законов классической механики, подразумевая применимость преобразований Галилея, оставляя открытым вопрос о применимости принципа относительности к оптике и электродинамике.
В современной литературе принцип относительности в его применении к инерциальным системам отсчета (чаще всего при отсутствии гравитации или при пренебрежении ею) обычно выступает терминологически как лоренц-ковариантность (или лоренц-инвариантность).
5) Силы в природе.
Несмотря на разнообразие сил, имеется всего четыре типа взаимодействий: гравитационное, электромагнитное, сильное и слабое.
Гравитационные силы заметно проявляются в космических масштабах. Одним из проявлений гравитационных сил является свободное падение тел. Земля сообщает всем телам одно и то же ускорение, которое называют ускорением свободного падения g. Оно незначительно меняется в зависимости от географической широты. На широте Москвы оно равно 9,8 м/с2.
Электромагнитные силы действуют между частицами, имеющими электрические заряды. Сильные и слабые взаимодействия проявляются внутри атомных ядер и в ядерных превращениях.
Гравитационное взаимодействие существует между всеми телами, обладающими массами. Закон всемирного тяготения, открытый Ньютоном, гласит:
Сила взаимного притяжения двух тел, которые могут быть принятыми за материальные точки, прямо пропорциональна произведению их масс и обратно пропорциональна квадрату расстояния между ними:
Коэффициент пропорциональности у называют гравитационной постоянной. Она равна 6,67 10-11 Н м2/кг2.
Если на тело действует лишь гравитационная сила со стороны Земли, то она равна mg. Это и есть сила тяжести G (без учета вращения Земли). Сила тяжести действует на все тела, находящиеся на Земле, вне зависимости от их движения.
При движении тела с ускорением свободного падения (или даже с меньшим ускорением, направленным вниз) наблюдается явление полной или частичной невесомости.
Полная невесомость - отсутствие давления на подставку или на подвес. Вес - сила давления тела на горизонтальную опору или сила растяжения нити со стороны подвешенного к ней тела, которая возникает в связи с гравитационным притяжением данного тела к Земле.
Силы притяжения между телами неуничтожимы, тогда как вес тела может исчезнуть. Так, в спутнике, который двигается с первой космической скоростью вокруг Земли, вес отсутствует так же, как в лифте, падающем с ускорением g.
Примером электромагнитных сил являются силы трения и упругости. Различают силы трения скольжения и силы трения качения. Сила трения скольжения намного больше силы трения качения.
Сила трения зависит в некотором интервале от приложенной силы, которая стремится сдвинуть одно тело относительно другого. Прикладывая различную по величине силу, увидим, что небольшие силы не могут сдвинуть тело. При этом возникает компенсирующая сила трения покоя.
При отсутствии сил, сдвигающих тело, сила трения покоя равна нулю. Наибольшее значение сила трения покоя приобретает в момент, когда одно тело начинает двигаться относительно другого. В этом случае сила трения покоя становится равной силе трения скольжения:
![]()
где n - коэффициент трения, N - сила нормального (перпендикулярного) давления. Коэффициент трения зависит от вещества трущихся поверхностей и их шероховатости.
6) Зако́н сохране́ния и́мпульса (Зако́н сохране́ния количества движения) утверждает, что векторная сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.
В классической механике закон сохранения импульса обычно выводится как следствие законов Ньютона. Из законов Ньютона можно показать, что при движении в пустом пространстве импульс сохраняется во времени, а при наличии взаимодействия скорость его изменения определяется суммой приложенных сил.
Как и любой из фундаментальных законов сохранения, закон сохранения импульса описывает одну из фундаментальных симметрий, - однородность пространства.
Центр масс в механике - это геометрическая точка, характеризующая движение тела или системы частиц как целого. онятие центра масс широко используется в физике.
Движение твёрдого тела можно рассматривать как суперпозицию движения центра масс и вращательного движения тела вокруг его центра масс. Центр масс при этом движется так же, как двигалось бы тело с такой же массой, но бесконечно малыми размерами (материальная точка). Последнее означает, в частности, что для описания этого движения применимы все законы Ньютона. Во многих случаях можно вообще не учитывать размеры и форму тела и рассматривать только движение его центра масс.Часто бывает удобно рассматривать движение замкнутой системы в системе отсчёта, связанной с центром масс. Такая система отсчёта называется системой центра масс (Ц-система), или системой центра инерции. В ней полный импульс замкнутой системы всегда остаётся равным нулю, что позволяет упростить уравнения её движения.
Эне́ргия - скалярная физическая величина, являющаяся единой мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие. Механическая работа - это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины и направления силы (сил) и от перемещения точки (точек) тела или системы. Энергия является мерой способности физической системы совершить работу, поэтому количественно энергия и работа выражаются в одних единицах.
Механическая работа и механическая энергия отождествляются.
Мо́щность - физическая величина, равная отношению работы, выполняемой за некоторый промежуток времени, к этому промежутку времени.
Кинети́ческая эне́ргия - энергия механической системы, зависящая от скоростей движения её точек. Часто выделяют кинетическую энергию поступательного и вращательного движения. Единица измерения в системе СИ - Джоуль.Более строго, кинетическая энергия есть разность между полной энергией системы и её энергией покоя; таким образом, кинетическая энергия - часть полной энергии, обусловленная движением.
Потенциальная энергия - скалярная физическая величина, характеризующая способность некоего тела (или материальной точки) совершать работу за счет его нахождения в поле действия сил. Корректное определение потенциальной энергии может быть дано только в поле сил, работа которых зависит только от начального и конечного положения тела, но не от траектории его перемещения. Такие силы называются консервативными.Также потенциальная энергия является характеристикой взаимодействия нескольких тел или тела и поля.Любая физическая система стремится к состоянию с наименьшей потенциальной энергией. Потенциальная энергия в поле тяготения Земли вблизи поверхности приближённо выражается формулой:
где Ep - потенциальная энергия тела, m - масса тела, g - ускорение свободного падения, h - высота положения центра масс тела над произвольно выбранным нулевым уровнем.
О физическом смысле понятия потенциальной энергии
Если кинетическая энергия может быть определена для одного отдельного тела, то потенциальная энергия всегда характеризует как минимум два тела или положение тела во внешнем поле.
Кинетическая энергия характеризуется скоростью; потенциальная - взаиморасположением тел.
Основной физический смысл имеет не само значение потенциальной энергии, а её изменение.
8) В физике механи́ческая эне́ргия описывает сумму потенциальной и кинетической энергии, имеющихся в компонентах механической системы. Механическая энергия - это энергия, связанная с движением объекта или его положением.Закон сохранения механической энергии утверждает, что если тело или система подвергается действию только консервативных сил, то полная механическая энергия этого тела или системы остаётся постоянной. В изолированной системе, где действуют только консервативные силы, полная механическая энергия сохраняется.
Похожая информация.
Энергией называется скалярная физическая величина, являющаяся единой мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие.
Для характеристики различных форм движения материи вводятся соответствующие виды энергии, например: механическая, внутренняя, энергия электростатических, внутриядерных взаимодействий и др.
Энергия подчиняется закону сохранения, который является одним из важнейших законов природы.
Механическая энергия Е характеризует движение и взаимодействие тел и является функцией скоростей и взаимного расположения тел. Она равна сумме кинетической и потенциальной энергий.
Кинетическая энергия
Рассмотрим случай, когда на тело массой m действует постоянная сила \(~\vec F\) (она может быть равнодействующей нескольких сил) и векторы силы \(~\vec F\) и перемещения \(~\vec s\) направлены вдоль одной прямой в одну сторону. В этом случае работу силы можно определить как A = F ∙s . Модуль силы по второму закону Ньютона равен F = m∙a , а модуль перемещения s при равноускоренном прямолинейном движении связан с модулями начальной υ 1 и конечной υ 2 скорости и ускорения а выражением \(~s = \frac{\upsilon^2_2 - \upsilon^2_1}{2a}\) .
Отсюда для работы получаем
\(~A = F \cdot s = m \cdot a \cdot \frac{\upsilon^2_2 - \upsilon^2_1}{2a} = \frac{m \cdot \upsilon^2_2}{2} - \frac{m \cdot \upsilon^2_1}{2}\) . (1)
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела .
Кинетическая энергия обозначается буквой E k .
\(~E_k = \frac{m \cdot \upsilon^2}{2}\) . (2)
Тогда равенство (1) можно записать в таком виде:
\(~A = E_{k2} - E_{k1}\) . (3)
Теорема о кинетической энергии
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения υ , то работа силы равна конечному значению кинетической энергии тела:
\(~A = E_{k2} - E_{k1}= \frac{m \cdot \upsilon^2}{2} - 0 = \frac{m \cdot \upsilon^2}{2}\) . (4)
Физический смысл кинетической энергии
кинетическая энергия тела, движущегося со скоростью υ, показывает, какую работу должна совершить сила, действующая на покоящееся тело, чтобы сообщить ему эту скорость.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы , работа которых зависит только от начального и конечного положения движущейся материальной точки или тела и не зависит от формы траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие.
Силы , работа которых зависит от формы траектории, называются непотенциальными . При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы не равна нулю.
Потенциальная энергия взаимодействия тела с Землей
Найдем работу, совершаемую силой тяжести F т при перемещении тела массой m вертикально вниз с высоты h 1 над поверхностью Земли до высоты h 2 (рис. 1). Если разность h 1 – h 2 пренебрежимо мала по сравнению с расстоянием до центра Земли, то силу тяжести F т во время движения тела можно считать постоянной и равной mg .
Так как перемещение совпадает по направлению с вектором силы тяжести, работа силы тяжести равна
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
Рассмотрим теперь движение тела по наклонной плоскости. При перемещении тела вниз по наклонной плоскости (рис. 2) сила тяжести F т = m∙g совершает работу
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.

Движение тела из точки В в точку С по любой траектории (рис. 3) можно мысленно представить состоящим из перемещений по участкам наклонных плоскостей с различными высотами h ’, h ’’ и т. д. Работа А силы тяжести на всем пути из В в С равна сумме работ на отдельных участках пути:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
где h 1 и h 2 – высоты от поверхности Земли, на которых расположены соответственно точки В и С .
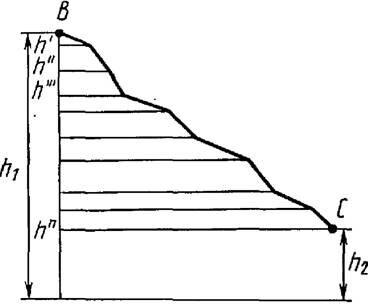
Равенство (7) показывает, что работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести на замкнутой траектории равна нулю.
Равенство (7) можно представить в таком виде:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Работа силы тяжести при перемещении тела массой m из точки, расположенной на высоте h 2 , в точку, расположенную на высоте h 1 от поверхности Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела и Земли, взятому с противоположным знаком.
\(~A = - (E_{p2} - E_{p1})\) . (9)
Потенциальная энергия обозначается буквой Е p .
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела на поверхности Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Е p тела, находящегося на высоте h над поверхностью Земли, равна произведению массы m тела на модуль ускорения свободного падения g и расстояние h его от поверхности Земли:
\(~E_p = m \cdot g \cdot h\) . (10)
Физический смысл потенциальной энергии взаимодействия тела с Землей
потенциальная энергия тела, на которое действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела на нулевой уровень.
В отличие от кинетической энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так и отрицательной. Тело массой m , находящееся на высоте h , где h < h 0 (h 0 – нулевая высота), обладает отрицательной потенциальной энергией:
\(~E_p = -m \cdot g \cdot h\) .
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М , находящихся на расстоянии r одна от другой, равна
\(~E_p = G \cdot \frac{M \cdot m}{r}\) . (11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Е p = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, M e – масса Земли, R e – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
\(~E_e = G \cdot \frac{M_e \cdot m \cdot h}{R_e \cdot (R_e +h)}\) . (12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « R e) равна
\(~E_p = m \cdot g \cdot h\) ,
где \(~g = G \cdot \frac{M_e}{R^2_e}\) – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x 1 до конечного значения x 2 (рис. 4, б, в).

Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т.к. сила упругости линейно зависит от x ) и умножить на модуль перемещения:
\(~A = F_{upr-cp} \cdot (x_1 - x_2)\) , (13)
где \(~F_{upr-cp} = k \cdot \frac{x_1 - x_2}{2}\) . Отсюда
\(~A = k \cdot \frac{x_1 - x_2}{2} \cdot (x_1 - x_2) = k \cdot \frac{x^2_1 - x^2_2}{2}\) или \(~A = -\left(\frac{k \cdot x^2_2}{2} - \frac{k \cdot x^2_1}{2} \right)\) . (14)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
\(~E_p = \frac{k \cdot x^2}{2}\) . (15)
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (16)
Если x 2 = 0 и x 1 = х , то, как видно из формул (14) и (15),
\(~E_p = A\) .
Физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Потенциальная энергия характеризует взаимодействующие тела, а кинетическая энергия – движущиеся тела. И потенциальная, и кинетическая энергия изменяются только в результате такого взаимодействия тел, при котором действующие на тела силы совершают работу, отличную от нуля. Рассмотрим вопрос об изменениях энергии при взаимодействиях тел, образующих замкнутую систему.
Замкнутая система – это система, на которую не действуют внешние силы или действие этих сил скомпенсировано . Если несколько тел взаимодействуют между собой только силами тяготения и силами упругости и никакие внешние силы на них не действуют, то при любых взаимодействиях тел работа сил упругости или сил тяготения равна изменению потенциальной энергии тел, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (17)
По теореме о кинетической энергии, работа тех же сил равна изменению кинетической энергии:
\(~A = E_{k2} - E_{k1}\) . (18)
Из сравнения равенств (17) и (18) видно, что изменение кинетической энергии тел в замкнутой системе равно по абсолютному значению изменению потенциальной энергии системы тел и противоположно ему по знаку:
\(~E_{k2} - E_{k1} = -(E_{p2} - E_{p1})\) или \(~E_{k1} + E_{p1} = E_{k2} + E_{p2}\) . (19)
Закон сохранения энергии в механических процессах :
сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и си-лами упругости, остается постоянной.
Сумма кинетической и потенциальной энергии тел называется полной механической энергией .
Приведем простейший опыт. Подбросим вверх стальной шарик. Сообщив начальную скорость υ нач, мы придадим ему кинетическую энергию, из-за чего он начнет подниматься вверх. Действие силы тяжести приводит к уменьшению скорости шарика, а значит, и его кинетической энергии. Но шарик поднимается выше и выше и приобретает все больше и больше потенциальной энергии (Е p = m∙g∙h ). Таким образом, кинетическая энергия не исчезает бесследно, а происходит ее превращение в потенциальную энергию.
В момент достижения верхней точки траектории (υ = 0) шарик полностью лишается кинетической энергии (Е k = 0), но при этом его потенциальная энергия становится максимальной. Дальше шарик меняет направление движения и с увеличивающейся скоростью движется вниз. Теперь происходит обратное превращение потенциальной энергии в кинетическую.
Закон сохранения энергии раскрывает физический смысл понятия работы :
работа сил тяготения и сил упругости, с одной стороны, равна увеличению кинетической энергии, а с другой стороны, – уменьшению потенциальной энергии тел. Следовательно, работа равна энергии, превратившейся из одного вида в другой.
Закон об изменении механической энергии
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
\(~A_{vn} = \Delta E = E - E_0\) . (20)
где Е и Е 0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
Примером такой системы может служить система, в которой наряду с потенциальными силами действуют непотенциальные силы. К непотенциальным силам относятся силы трения. В большинстве случаев, когда угол между силой трения F r тела составляет π радиан, работа силы трения отрицательна и равна
\(~A_{tr} = -F_{tr} \cdot s_{12}\) ,
где s 12 – путь тела между точками 1 и 2.
Силы трения при движении системы уменьшают ее кинетическую энергию. В результате этого механическая энергия замкнутой неконсервативной системы всегда уменьшается, переходя в энергию немеханических форм движения.
Например, автомобиль, двигавшийся по горизонтальному участку дороги, после выключения двигателя проходит некоторый путь и под действием сил трения останавливается. Кинетическая энергия поступательного движения автомобиля стала равной нулю, а потенциальная энергия не увеличилась. Во время торможения автомобиля произошло нагревание тормозных колодок, шин автомобиля и асфальта. Следовательно, в результате действия сил трения кинетическая энергия автомобиля не исчезла, а превратилась во внутреннюю энергию теплового движения молекул.
Закон сохранения и превращения энергии
при любых физических взаимодействиях энергия превращается из одной формы в другую.
Иногда угол между силой трения F tr и элементарным перемещением Δr равен нулю и работа силы трения положительна:
\(~A_{tr} = F_{tr} \cdot s_{12}\) ,
Пример 1 . Пусть, внешняя сила F действует на брусок В , который может скользить по тележке D (рис. 5). Если тележка перемещается вправо, то работа силы трения скольжения F tr2 , действующей на тележку со стороны бруска, положительна:

Пример 2 . При качении колеса его сила трения качения направлена вдоль движения, так как точка соприкосновения колеса с горизонтальной поверхностью двигается в направлении, противоположном направлению движения колеса, и работа силы трения положительна (рис. 6):

Литература
- Кабардин О.Ф. Физика: Справ. материалы: Учеб. пособие для учащихся. – М.: Просвещение, 1991. – 367 с.
- Кикоин И.К., Кикоин А.К. Физика: Учеб. для 9 кл. сред. шк. – М.: Про-свещение, 1992. – 191 с.
- Элементарный учебник физики: Учеб. пособие. В 3 т. / Под ред. Г.С. Ландсберга: т. 1. Механика. Теплота. Молекулярная физика. – М.: Физматлит, 2004. – 608 с.
- Яворский Б.М., Селезнев Ю.А. Справочное руководство по физике для поступающих в вузы и самообразования. – М.: Наука, 1983. – 383 с.
Кинетическая энергия - энергия механической системы, зависящая от скоростей движения её точек. Часто выделяют кинетическую энергию поступательного и вращательного движения. Единица измерения в системе СИ - Джоуль. Более строго, кинетическая энергия есть разность между полной энергией системы и её энергией покоя; таким образом, кинетическая энергия - часть полной энергии, обусловленная движением.
Рассмотрим случай, когда на тело массой m действует постоянная сила (она может быть равнодействующей нескольких сил) и векторы силы и перемещения направлены вдоль одной прямой в одну сторону. В этом случае работу силы можно определить как A = F∙s. Модуль силы по второму закону Ньютона равен F = m∙a, а модуль перемещения s при равноускоренном прямолинейном движении связан с модулями начальной υ 1 и конечной υ 2 скорости и ускорения а выражением
Отсюда для работы получаем
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела .
Кинетическая энергия обозначается буквой E k .
Тогда равенство (1) можно записать в таком виде:
A = E k 2 – E k 1 . (3)
Теорема о кинетической энергии:
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой т равна нулю и тело увеличивает свою скорость до значения υ , то работа силы равна конечному значению кинетической энергии тела:
![]() (4)
(4)
Физический смысл кинетической энергии:
кинетическая энергия тела, движущегося со скоростью υ, показывает, какую работу должна совершить сила, действующая на покоящееся тело, чтобы сообщить ему эту скорость.
Потенциальная энергия - минимальная работа, которую необходимо совершить, чтобы перенести тело из некой точки отсчёта в данную точку в поле консервативных сил. Второе определение: потенциальная энергия - это функция координат, являющаяся слагаемым в лагранжиане системы, и описывающая взаимодействие элементов системы. Третье определение: потенциальная энергия - это энергия взаимодействия. Единицы измерения [Дж]
Потенциальная энергия принимается равной нулю для некоторой точки пространства, выбор которой определяется удобством дальнейших вычислений. Процесс выбора данной точки называется нормировкой потенциальной энергии. Понятно также, что корректное определение потенциальной энергии может быть дано только в поле сил, работа которых зависит только от начального и конечного положения тела, но не от траектории его перемещения. Такие силы называются консервативными.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы , работа которых зависит только от начального и конечного положения движущейся материальной точки или тела и не зависит от формы траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие.
Силы , работа которых зависит от формы траектории, называются непотенциальными . При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы не равна нулю.
Потенциальная энергия взаимодействия тела с Землей.
Найдем работу, совершаемую силой тяжести F т при перемещении тела массой т вертикально вниз с высоты h 1 над поверхностью Земли до высоты h 2 (рис. 1).
Если разность h 1 – h 2 пренебрежимо мала по сравнению с расстоянием до центра Земли, то силу тяжести F т во время движения тела можно считать постоянной и равной mg.
Так как перемещение совпадает по направлению с вектором силы тяжести, работа силы тяжести равна
A = F∙s = m∙g∙ (h l – h 2). (5)
Рассмотрим теперь движение тела по наклонной плоскости. При перемещении тела вниз по наклонной плоскости (рис. 2) сила тяжести F т = m∙g совершает работу
A = m∙g∙s∙cos a = m∙g∙h , (6)
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.

Движение тела из точки В в точку С по любой траектории (рис. 3) можно мысленно представить состоящим из перемещений по участкам наклонных плоскостей с различными высотами h" , h" и т. д. Работа А силы тяжести на всем пути из В в С равна сумме работ на отдельных участках пути:
 (7)
(7)
где h 1 и h 2 – высоты от поверхности Земли, на которых расположены соответственно точки В и С.

Равенство (7) показывает, что работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести на замкнутой траектории равна нулю.
Равенство (7) можно представить в таком виде:
A = – (m∙g∙h 2 – m∙g∙h l). (8)
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Работа силы тяжести при перемещении тела массой т из точки, расположенной на высоте h 2 , в точку, расположенную на высоте h 1 от поверхности Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела и Земли, взятому с противоположным знаком.
А = – (Е р 2 – Е р 1). (9)
Потенциальная энергия обозначается буквой Е р .
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела на поверхности Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Е р тела, находящегося на высоте h над поверхностью Земли, равна произведению массы m тела на модуль ускорения свободного падения g и расстояние h его от поверхности Земли:
E p = m∙g∙h . (10)
Физический смысл потенциальной энергии взаимодействия тела с Землей:
потенциальная энергия тела, на которое действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела на нулевой уровень.
В отличие от кинетической энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так и отрицательной. Тело массой m , находящееся на высоте h, где h 0 (h 0 – нулевая высота), обладает отрицательной потенциальной энергией:
Е p = –m∙gh
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами т и М , находящихся на расстоянии r одна от другой, равна
![]() (11)
(11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Е p = 0) принят при r = ∞. Потенциальная энергия гравитационного взаимодействия тела массой т с Землей, где h – высота тела над поверхностью Земли, М 3 – масса Земли, R 3 – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
![]() (12)
(12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой т с Землей для малых высот h (h « R 3) равна
Е p = m∙g∙h ,
где – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x 1 до конечного значения x 2 (рис. 4, б, в).

Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т. к. сила упругости линейно зависит от x ) и умножить на модуль перемещения:
![]() (13)
(13)
где
![]() Отсюда
Отсюда
![]()
 (14)
(14)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
А = –(Е р 2 – Е р 1). (16)
Если x 2 = 0 и x 1 = х , то, как видно из формул (14) и (15),
Е р = А.
Тогда физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Потенциальная энергия - скалярная физическая величина, характеризующая способность некоего тела (или материальной точки) совершать работу за счет его нахождения в поле действия сил.
Форвардный курс и его расчет.
Рынок срочных валютных операций. Форвардные сделки.
На форвардном рынке торгуют валютой с поставкой в будущем по фиксированному курсу. Форвардный рынок характеризуется целым рядом особенностей.
- На форвардном рынке не существует единого стандарта, связанного с датой расчётов. Любой день после спотовой даты может быть датой расчётов по форвардной сделке.
- Продолжительность сделок на форвардном рынке варьируется от 3дней до 3 лет.
- Форвардный рынок имеет децентрализованную структуру. Его участники по всему миру вступают в сделки либо непосредственно друг с другом, либо через посредство брокеров.
- Форвардный рынок характеризуется сложным механизмом курсообразования. Форвардное ценообразование зависит одновременно от трёх факторов – от спотового обменного курса, даты расчётов и разницы в процентных ставках.
- Форвардный рынок менее волатилен по сравнению со спотовым рынком, поэтому его называют медленным рынком.
Существуют два основных вида дат валютирования на форвардном рынке: стандартные и нестандартные. Стандартными форвардными датами валютирования называются:
- сроки расчётов, совпадающие с одной неделей, одним месяцем, одним годом или совокупностью этих периодов времени;
- дата расчёта «том-некст» (tomorrow/next, T/N), которая означает дату поставки валюты на следующий рабочий день или за один рабочий день до спотовой даты;
- дата расчёта «спот-некст» (spot/next, S/N), которая предполагает дату расчёта через рабочий день после спотовой даты или через три рабочих дня после заключения сделки;
- наличная дата (cashdate), когда дата поставки валюты совпадает с датой заключения сделки.
Нестандартной форвардной датой является любая оговорённая в контракте дата расчётов, не совпадающая со стандартной датой валютирования.
Особенности определения дат валютирования в форвардных сделках. Форвардные даты валютирования основываются на спотовых датах, поэтому при их определении необходимо отсчитывать от спотовой даты, а не от даты заключения сделки.
Единицей измерения энергии в СИ является Джоуль. Потенциальная энергия принимается равной нулю для некоторой конфигурации тел в пространстве, выбор которой определяется удобством дальнейших вычислений. Процесс выбора данной конфигурации называется нормировкой потенциальной энергии.
Корректное определение потенциальной энергии может быть дано только в поле сил, работа которых зависит только от начального и конечного положения тела, но не от траектории его перемещения. Такие силы называются консервативными.
Также потенциальная энергия является характеристикой взаимодействия нескольких тел или тела и поля.
Любая физическая система стремится к состоянию с наименьшей потенциальной энергией.
Потенциальная энергия упругой деформации характеризует взаимодействие между собой частей тела.
Потенциальная энергия в поле тяготения Земли вблизи поверхности приближённо выражается формулой:
где m - масса тела, g - ускорение свободного падения, h- высота положения центра масс тела над произвольно выбранным нулевым уровнем.
1. Если кинетическая энергия может быть определена для одного отдельного тела, то потенциальная энергия всегда характеризует как минимум два тела или положение тела во внешнем поле.
2. Кинетическая энергия характеризуется скоростью; потенциальная - взаиморасположением тел.
3. Основной физический смысл имеет не само значение потенциальной энергии, а её изменение.









- Самые эффективные домашние маски для волос
- Что такое ишемический инсульт, прогноз для жизни Ишемический инсульт прогноз для жизни пожилой
- Резиновые сапоги — с чем носить резиновую обувь
- Как должны сидеть брюки
- Как искать самородное золото
- Аппаратный педикюр Аппаратный педикюр пошагово дома
- Какой выбрать подарок дачнику на день рождения Подарок для дачи на новый год
- Как сделать макияж самой себе
- Для чего нужны базовые масла в мыловарении
- Сороковая неделя беременности — подготовка к родам
- Тату Элджея — Японские Мотивы и Модные Татуировки Элджея
- Украшения на хэллоуин своими руками или как сделать украшения на хэллоуин
- Сумки вязаные спицами схемы и описание
- Как прекратить лактацию в домашних условиях?
- Мастер-класс поделка изделие вязание крючком вязаные прихватки павлины пряжа
- Пушистый пасхальный кролик
- Какой это размер One Size по-русски Какой это размер - one size?
- Как заставить мужчину пожалеть о расставании
- Как женщина может понять что мужчина влюблен
- Что надо знать родителям о четырёхмесячном ребёнке?